Questions: Figure 2.81: Electromechanical system.
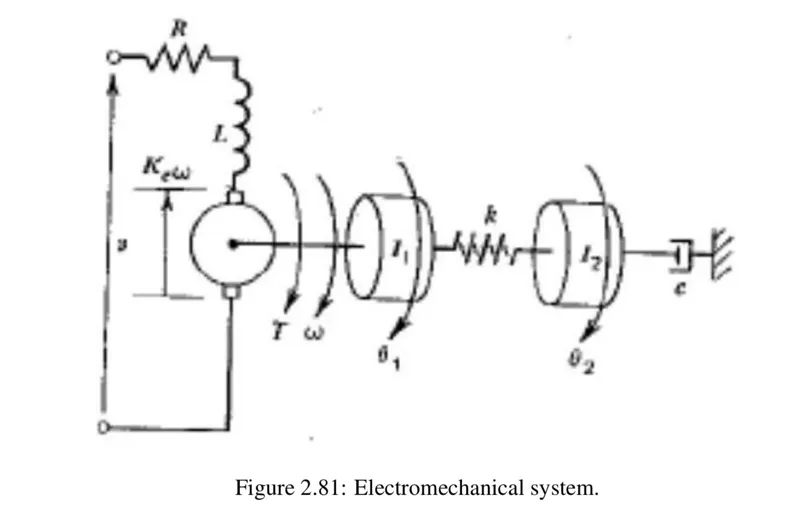
Transcript text: Figure 2.81: Electromechanical system.
Solution
Was this solution helpful?





